2.4 Value Iteration and Policy Iteration (策略迭代与truncated iteration)
前置知识
2.3 Value Iteration and Policy Iteration (值迭代)
策略代算法流程
-
第一步:给定一个随机初始策略,计算状态值
这里计算状态值, 使用了1.2 State Values and Bellman Equation (Vector form 与 求解)所述的迭代过程。
-
第二步:更新策略
求得了状态值后,使利用它找到每个状态的最大的action value,从而更新策略

-
迭代:更新完策略后,再用新策略计算状态值,等于大迭代里套小迭代。
具体实现

\(v_{\pi_k}^{(j)}\left(s^{\prime}\right)\) 为第k次迭代算到的状态值,策略是给定的,其他都是已知的,因此可以算得第k+1次的状态值。算到了状态后,再用来更新策略,如下:
\(\pi_{k+1}(s)=\arg \max _\pi \sum_a \pi(a \mid s) \underbrace{\left(\sum_r p(r \mid s, a) r+\gamma \sum_{s^{\prime}} p\left(s^{\prime} \mid s, a\right) v_{\pi_k}\left(s^{\prime}\right)\right)}_{q_{\pi_k}(s, a)}, \quad s \in \mathcal{S}\),
找到了策略后,再用来计算下一次的状态值,如此迭代。
Truncated policy iteration
策略迭代中,从初始策略开始
-
Policy Evaluation (PE),计算状态担
\(v_{\pi_k}=r_{\pi_k}+\gamma P_{\pi_k} v_{\pi_k}\).
-
Policy Improvement (PI), 更新策略
\(\pi_{k+1}=\arg \max _\pi\left(r_\pi+\gamma P_\pi v_{\pi_k}\right)\).
值迭代,从值出发
-
Policy update (PU): 利用给定的假状态值,直接更新策略
\(\pi_{k+1}=\arg \max _\pi\left(r_\pi+\gamma P_\pi v_k\right)\).
-
Value Update (VU): 更新完策略后,利用新策略和旧的假状态值得到新的状态值
\(v_{k+1}=r_{\pi_{k+1}}+\gamma P_{\pi_{k+1}} v_k\)
比较
Policy iteration: \(\pi_0 \xrightarrow{P E} v_{\pi_0} \xrightarrow{P I} \pi_1 \xrightarrow{P E} v_{\pi_1} \xrightarrow{P I} \pi_2 \xrightarrow{P E} v_{\pi_2} \xrightarrow{P I} \ldots\) Value iteration: \(\quad v_0 \xrightarrow{P U} \pi_1^{\prime} \xrightarrow{V U} v_1 \xrightarrow{P U} \pi_2^{\prime} \xrightarrow{V U} v_2 \xrightarrow{P U} \ldots\)
其实是非常类似的。 我的看法是,2个算法的区别在于是否真的要算状态值,值迭代方法每次在算状态值的时候就算一次,然后就来更新策略,策略迭代算法每次都要把状态值完美地算出来,再来更新策略
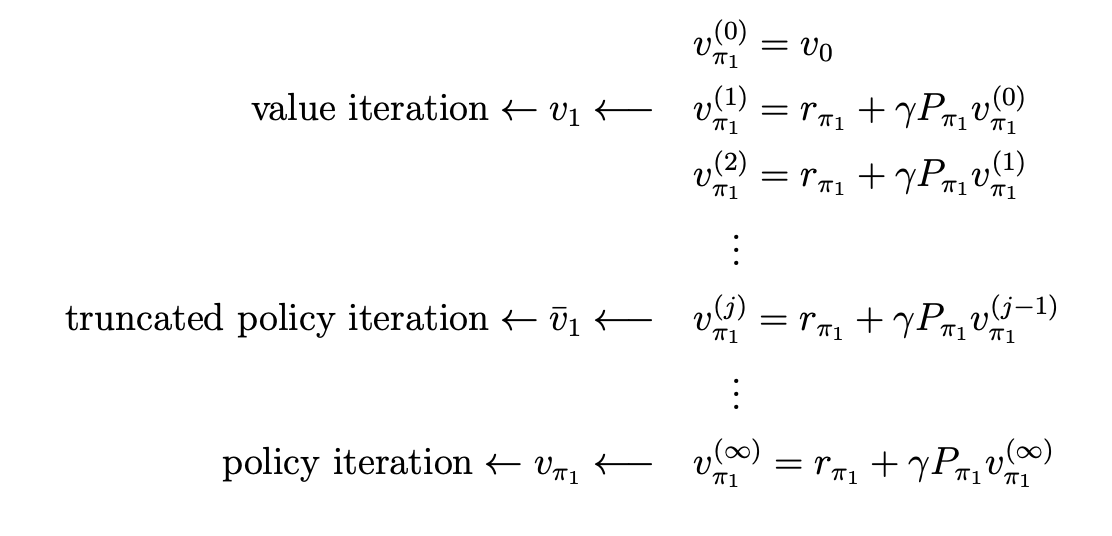
这2个方法是2个极端,因此在truncated iteration中,每次指定一个阈值,用来限制计算状态值时的迭代次数,虽然也是迭代套迭代,但不致于要算出每个策略最终的状态值,因为没有必要。
truncated policy iteration
用一个图表示这个算法,其实就是前2个算法的折中方法。
总结
- BOE,定义,表达
- BOE的求解
- 值迭代与策略迭代
- truncated policy iteration
文若可采,幸赐清茗一盏,以助笔耕不辍
福生无量
