2.3 Value Iteration and Policy Iteration (值迭代)
前置知识
2.2 Optimal State Values and Bellman Optimality Equality (BoE 求解)
Value Iteration Algorithm
回忆一下BOE的形式
\(v_{k+1}=\max _{\pi \in \Pi}\left(r_\pi+\gamma P_\pi v_k\right), \quad k=0,1,2, \ldots\)
在使用它求解BOE的时候,其产是分2步进行的
-
第一步:策略更新
针对给定的\(v_k\),求得更新后的策略\(\pi_{k+1}\)
\(\pi_{k+1}=\arg \max _\pi\left(r_\pi+\gamma P_\pi v_k\right)\)
-
第二步:值更新
针对求得的新的策略,计算value 值\(v_{k+1}\)
\(v_{k+1}=r_{\pi_{k+1}}+\gamma P_{\pi_{k+1}} v_k\)
这里要注意的是,上述迭代过程中,\(v_k\) 并不是state value.
也就是说,初始时候给定的一个\(v_k\),我们直接拿它算所有动作值,再利用动作值更新策略,更用策略和BOE计算新的\(v_k\),此过程中的每一步的\(v_k\)都不是state value,它只是根据新的策略算出来的一个向量,前面说过其实可以利用迭代法计算出真正的\(v_k\),但是此过程中并没有这么算。如果每一次都算出真正的\(v_k\),那么恭喜你,学会了Policy Iteration算法。
如何求新策略:
-
首先求得所有的q
\(\pi_{k+1}(s)=\arg \max _\pi \sum_a \pi(a \mid s) \underbrace{\left(\sum_r p(r \mid s, a) r+\gamma \sum_{s^{\prime}} p\left(s^{\prime} \mid s, a\right) v_k\left(s^{\prime}\right)\right)}_{q_k(s, a)}, \quad s \in \mathcal{S}\)
-
更新action, 策略动作价值最大的action来替换原策略中的action:
\(\pi_{k+1}(a \mid s)= \begin{cases}1, & a=a_k^*(s) \\ 0, & a \neq a_k^*(s)\end{cases}\)
如何进行值更新:
\(v_{k+1}(s)=\sum_a \pi_{k+1}(a \mid s) \underbrace{\left(\sum_r p(r \mid s, a) r+\gamma \sum_{s^{\prime}} p\left(s^{\prime} \mid s, a\right) v_k\left(s^{\prime}\right)\right)}_{q_k(s, a)}, \quad s \in \mathcal{S}\).
利用新的策略代入旧式子,即可获得新的value。
例子
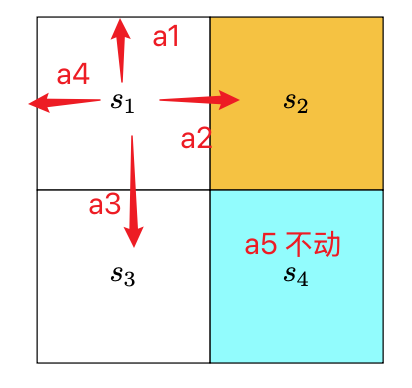
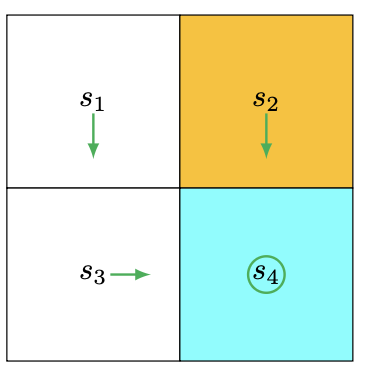
对于一个问题,参数设置:

初始状态图片:
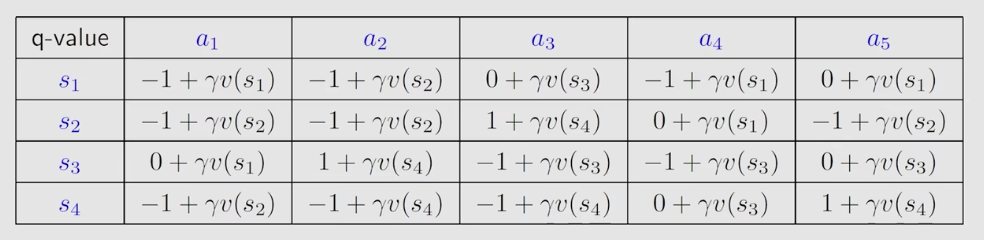
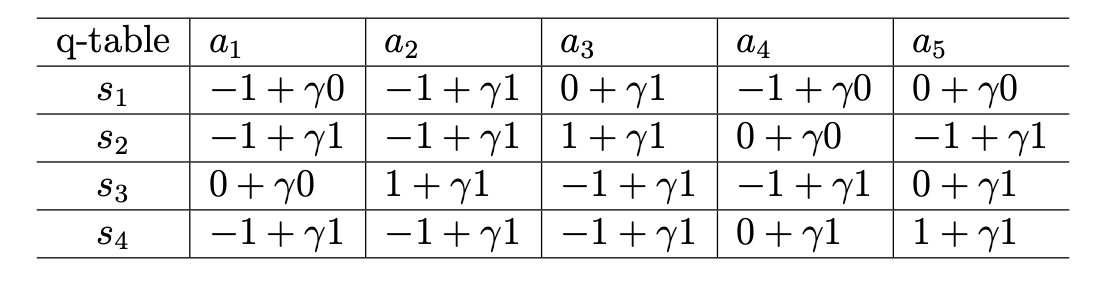
列出所有的状态对应的action的action value,获得一个q表,如下:
现在给所有的v(s)一个初始值0,代入这个q表中获昨新表:
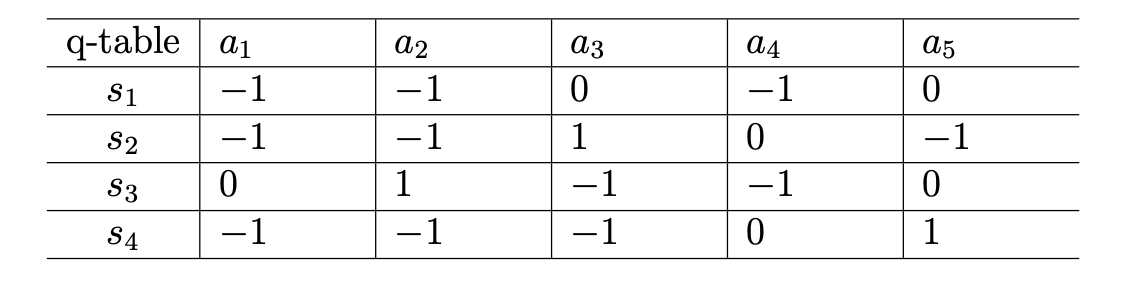
这时更新每一个状态s处的策略,选择最大的那个,即如果在s1处,策略选a3或a5,这里选的是a5,其他状态类似,得到
策略为:
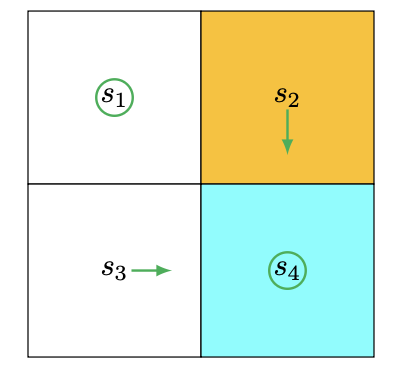
更新每个状态的value (这里是利用了亲的的策略和旧的value \(v_0\)计算得新的\(v_1\)):

新的策略,其图如下:
利用新的v值,代入q表中,获得:
此时再用新表结果,更新策略,得到的策略图:
这过程可以看到,并没有在每一步都要求出它的状态值,也就是说不管这个状态值真不真,一直迭代到最后都能获得最优策略,这就是神奇之处
Policy Iteration Algoritym
Truncated Policy Iteration Algorithm
文若可采,幸赐清茗一盏,以助笔耕不辍
福生无量
