1.1 State Values and Bellman Equation (Basic and Definition)
前置知识
从某一个状态出发,获得的return的和即为该状态的状态值v
Return
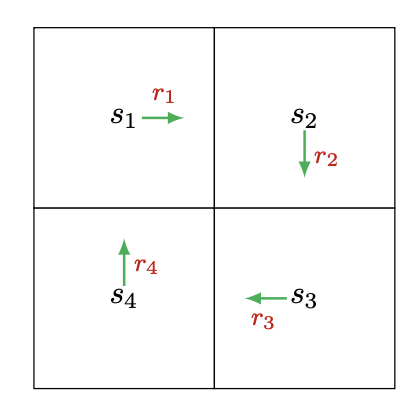
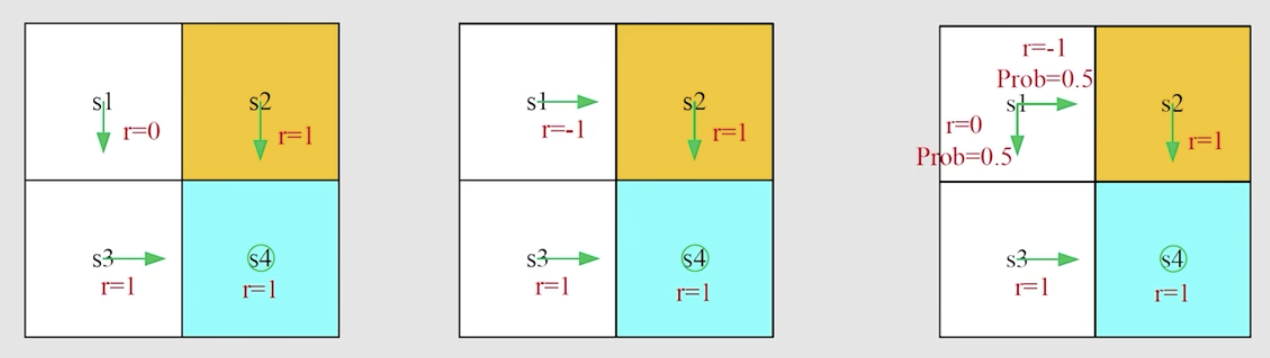
- 什么是return:沿某一个路径走,所有的discounted reward之和,比如下面这个图,如果不加discount,那第一个图中,从s1出发,return就是2。
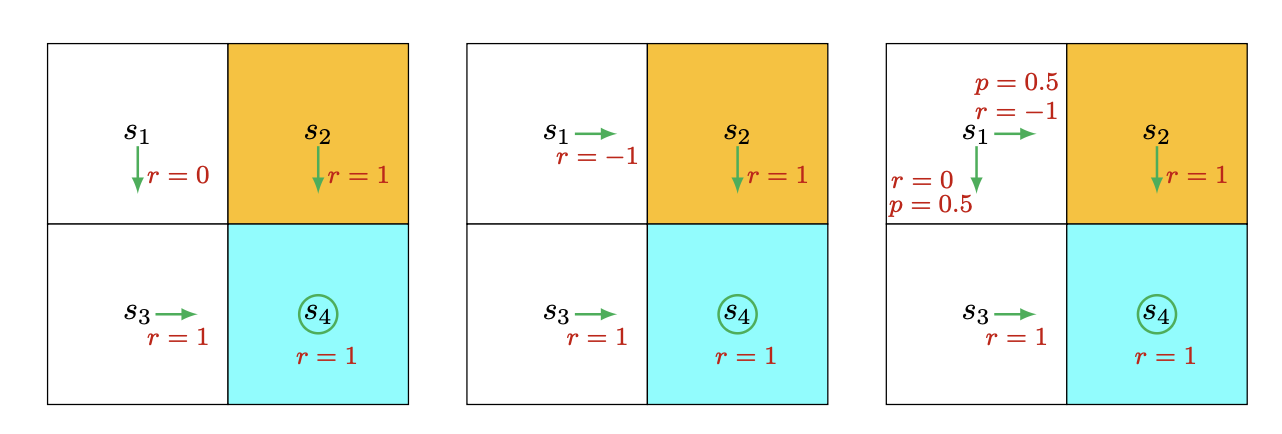
- 为什么return 重要? 上面3个策略中,直观上如果从s1出发,可以看到每一个图策略最好,第二个最差(会进入到黄色的forbiden area),return是用来帮助我们从数学上评估策略的好坏。
s4是终点,如果会在s4处一直循环,则这3个图的return分别为:
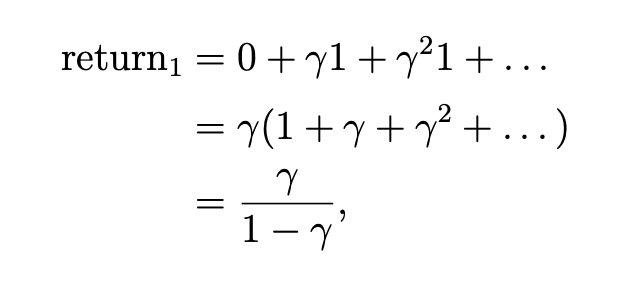
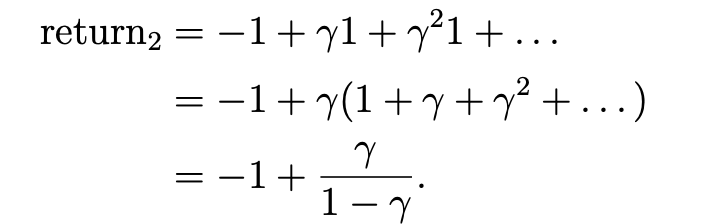
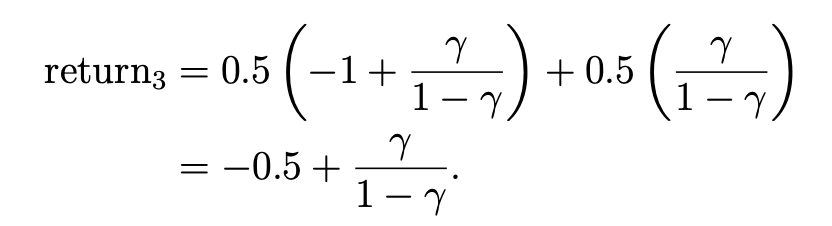
可以看到第一个大于第三个大于第二个
如何计算return
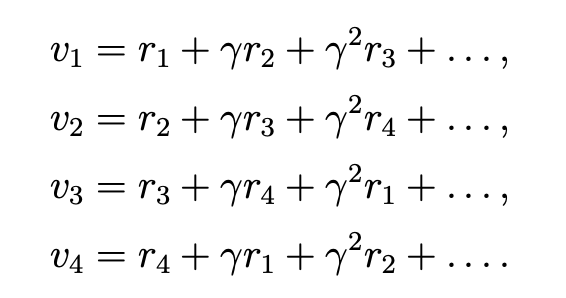
针对这个策略,如何计算由每个状态开始的return?
直接法
迭代法
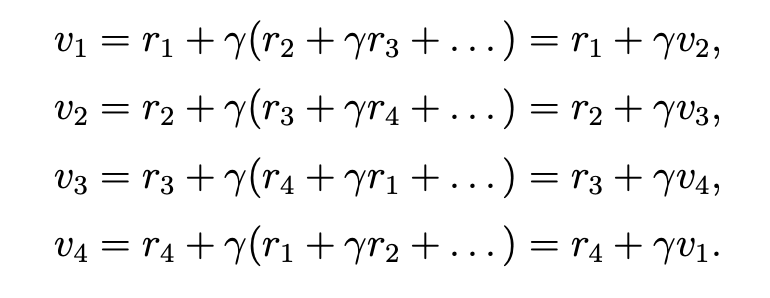
这种迭代法的公式是我们想要的,因为其可以通过bootstrapping方法求得最优策略
迭代法的式子可通过矩阵描述为:
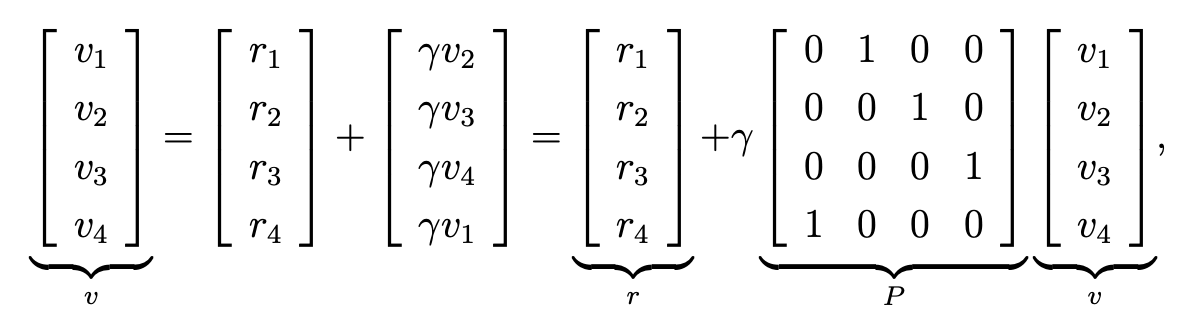
最终获得的简洁式子为:

在这个式子里,r是给定的,\(\gamma\) 也是给定的,\(v\)是我们要求的,可以通过一个初始值给定,P 可以根据策略生成
状态值是什么
单步概念
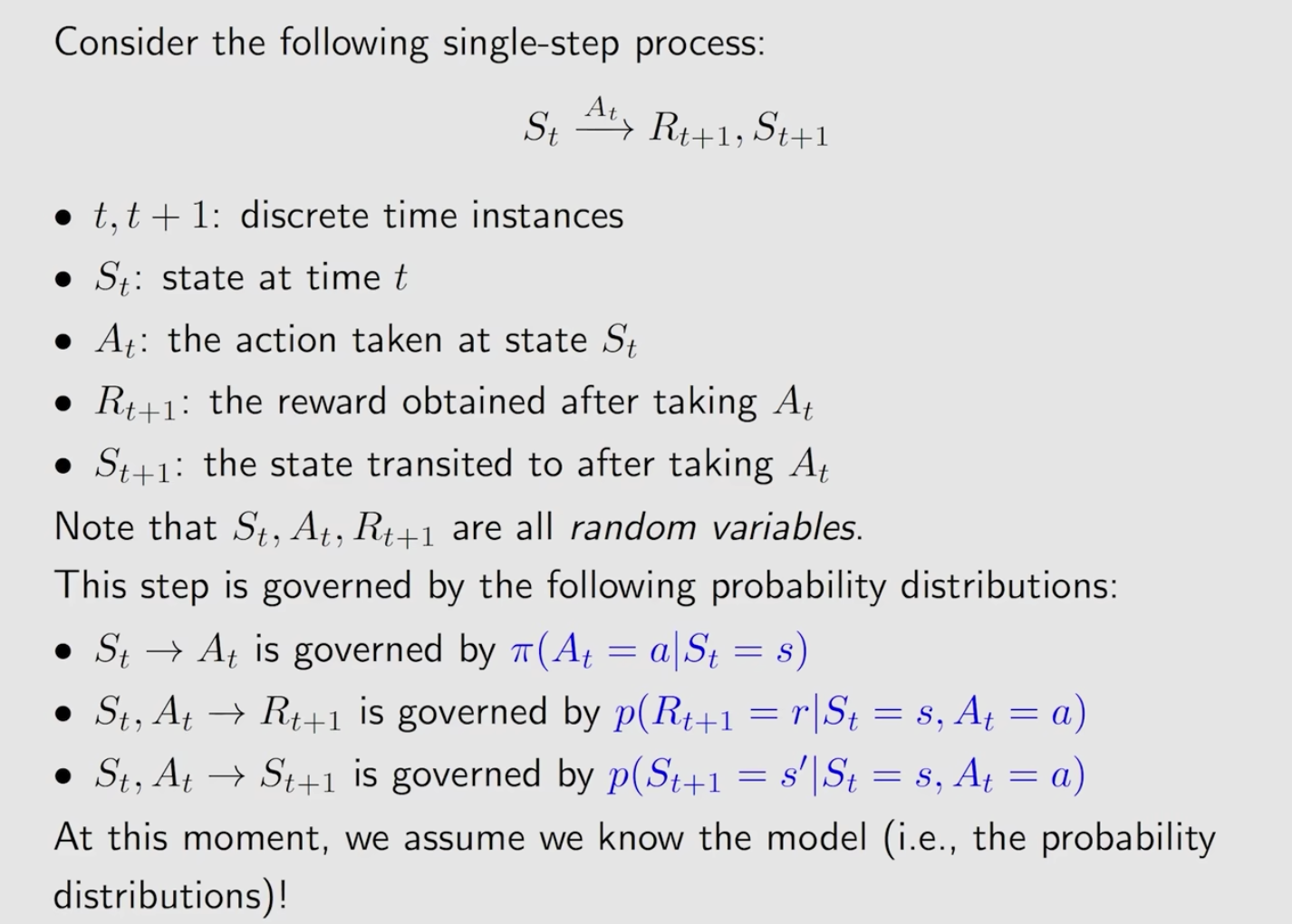 了解这个单步中,每个字母及下标的意思
了解这个单步中,每个字母及下标的意思
多步概念
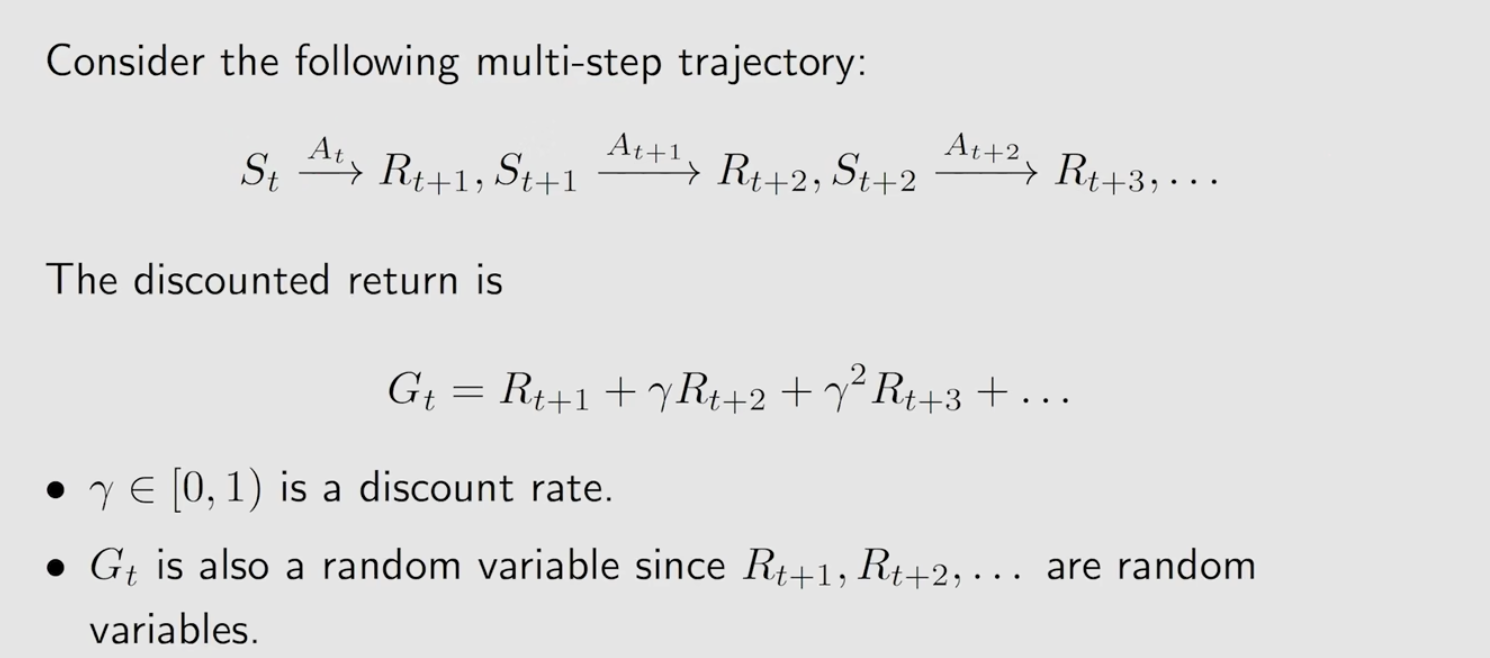
对于一个多步的trajectory, 它的每一步的discounted reward之和,即是return, 使用\(G_t\)表示
state value
即为\(G_t\)的期望,表示如下:

- return和state value区别:return是单个trajectory,state value为多个trajectory的return再求平均值。如果从某个状态出发,只会有一个trajectory,那return 和 state value其实是一样的
见下面的例子
这三个策略的状态值计算如下:
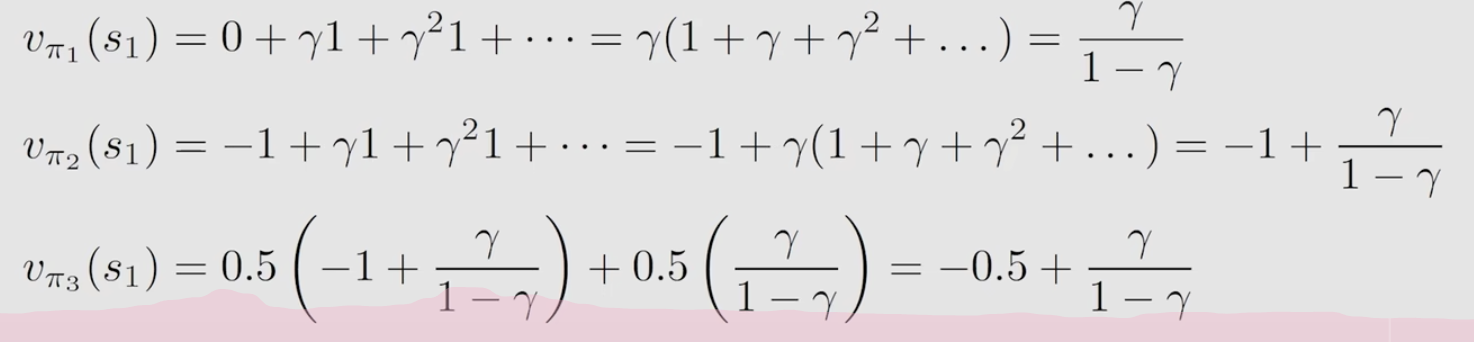
第一个和第二个的return和state value其实是一样的。在第3个策略中,由于在s1的下一步处有一个分裂,因此这个策略的state value即为分裂出来不同支的return的期望,即按概率乘上每一个trajectory的return。
贝尔曼公式, Bellman Equation
描述不同状态的state value之间的关系。
对于一个状态\(S_t\),它的trajectory为:

则它的return可以描述为:

将这个return描述成迭代式:
state value 的计算为它的期望,表示为:
2项分开来看
- 第一项
每一项即为当下状态到下一个状态,所有可能的reward的mean,即为:
在状态s,可能会有多个action,每个action概率 \(\pi (a|s)\), 而采取每个action又会获得一个reward,获取reward 为 r 的概率:\(p(r|s,a)\).
- 第二项
第二项为future rewards的mean,表示为:
这个式子意思为:在当下状态采取动作a(有个概率),会跳到下一个状态s’(有个概率),再计算在s’状态时的state value,再对前面所有的结果取一个mean(即所有可能的下一个状态都要算上,因此有一个求和符号)
因此合在一起的最终结果:
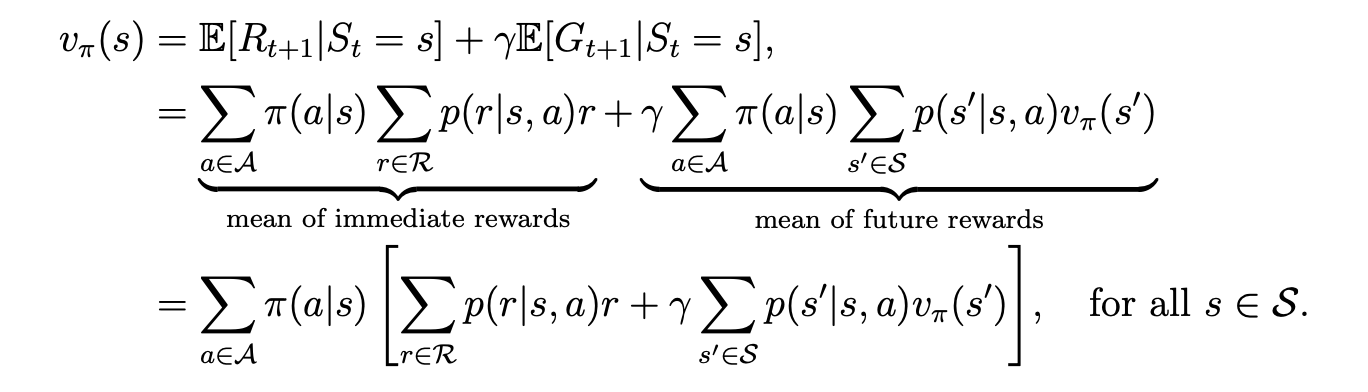
这个式子是对每一个状态都适用的,通过将每个状态的结果联立,最后可获得每一个状态的state value.
以前只觉得公式这个东西,只是对一个理论的简单记法,其实不然。如果逻辑正确,通过一套正确的公式推理,是可以推导出新的理论的,就像麦克斯伟的电磁理论,完全基于公式推理
文若可采,幸赐清茗一盏,以助笔耕不辍
福生无量
